Source: http://blog.makezine.com/2013/01/04/mindstorms-robotic-hand/
Crédits:
3 janv. 2013
This is my first Mindstorms MOC. I still need to get the programming shorted.
This idea has been laying around for more than 2 years. On different events I had the prototype finger with me to show what I was planning to do.
In September 2012 I started working on this project end finally finished in mid November, just in time for Lego Fanwelt Cologne Germany. My buddy Chris helped me getting started with programming during the event.
This is still the basic program from the event. Later I will program other hand movements, but for the video, this was good enough.
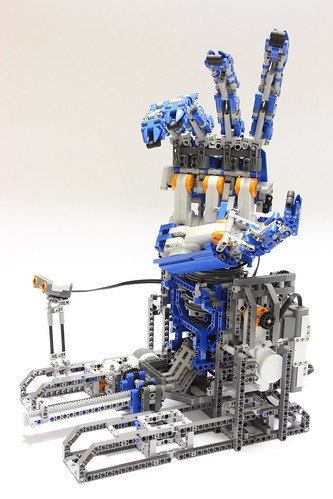
The MOC contains:
- 2 NXT units
- 6 NXT motors
- 1 Ultrasonic sensor for spotting movement tot start the program
- 1 Touch sensor for starting other programs (option isn't used yet)
De hand moves by 2 motors. 1 For moving the hand up and down en the other for rotation the hand. It can rotate 360 degrees, but the 4 not so flexible NXT cables make that difficult.
To hold the heavy hand, the wrist needs to be very strong, but also compact. I order to do that. I finally came up with a U-shape wrist section that holds a rotating tube with 2 pressure rings. This is the fourth version that finally works.
The rings are motorbike wheels (BL 88517), which can be connected to a Technic studless beam on the outside. The first wheel holds pressure on the turntable. Without it the turntable would detach from it's base, due to the weight of the hand. The second wheel conducts the weight of the hand to the rest of the wrist construction.
The hand holds 4 NXT motors to control the fingers and thumb. The 4 fingers are controlled by the 2 outside motors, that are attached to the index finger and pinky. All fingers are connected to a sliding beam, so that the middle and ring finger can also move. This system makes the hand compact, because you don't need 4 motor for each finger. The drawback is that the fingers can't be move separately. Anyone who has seen this always asks if it can give 'the finger', the answer is NO :)
The middle motor has 2 functions. It moves the thumb from and towards the hand. When the motor rotates further it touches the construction that make the fingers spread. So the thumb first moves a bit and the last past of that movement the fingers spread as well. The last motor moves the thumb in and out. It give a nice impression as a palm of the hand.
This hand was made for showing hand movements and not for grabbing. The construction isn't strong enough for grabbing.
In the near future I will reprogram the hand to make other movements.