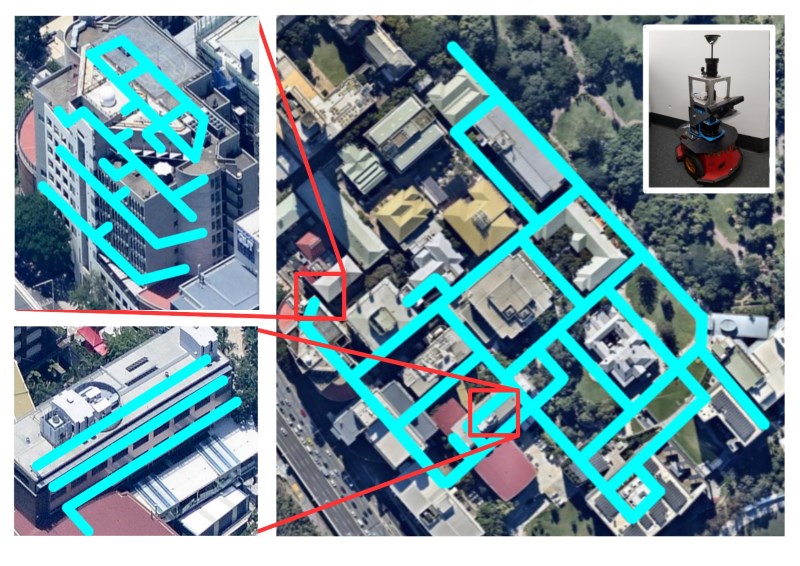
Deployable Navigation Policies - Navigation de robot à partir d'images sur une distance d'1km
De l'entrainement au déplacement d'un point A à un point B d'un robot autonome.
La vidéo plus bas montre les déplacements du robot dans sa vision 360°. Marrant, un temps à regarder ;)
Source: Mirko
Deployable Navigation Policies
Code and data accompanying "Learning Deployable Navigation Policies at Kilometer Scale from a Single Traversal"
rl-navigation.github.io
Code and data accompanying "Learning Deployable Navigation Policies at Kilometer Scale from a Single Traversal"
rl-navigation.github.io
La vidéo: