Crédits:
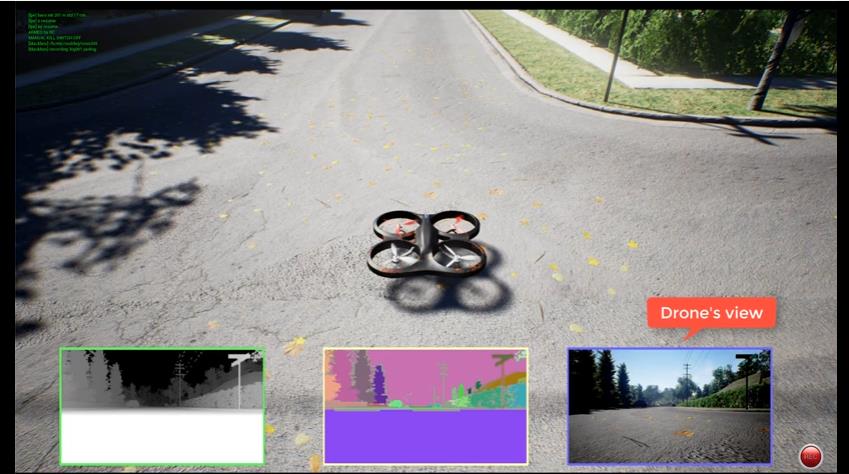
AirSim is a simulator for drones (and soon other vehicles) built on Unreal Engine. Its open source, cross platform and supports hardware-in-loop with popular platforms such as PixHawk for physically and visually realistic simulations. It is developed as Unreal plugin that can simply be dropped in to any environment you want.
Our goal is to develop AirSim as a platform for AI research where we can experiment with deep learning, computer vision and reinforcement learning algorithms for autonomous vehicles. For this purpose, AirSim also exposes APIs so you can retrieve sensor data, ground truth and camera images from the simulator. The APIs can also be used to send control commands to the vehicle in platform independent way.
http://github.com/Microsoft/AirSim